
Documentation Mécanique
Système de
Convoyeur Intelligent
Contexte du Projet
Dans le cadre d'une initiative de recyclage innovante, ce projet vise à développer un système mécanique de tri automatisé pour une usine de traitement des déchets.
Le convoyeur doit permettre la séparation de différents types de matériaux selon leurs propriétés physiques, avec une exigence particulière de robustesse et de maintenance simplifiée.
Challenge : concevoir une solution mécanique fiable pour environnement industriel, dans des délais serrés et avec un budget contraint.
Sélection des Matériaux
Stratégie Matériaux
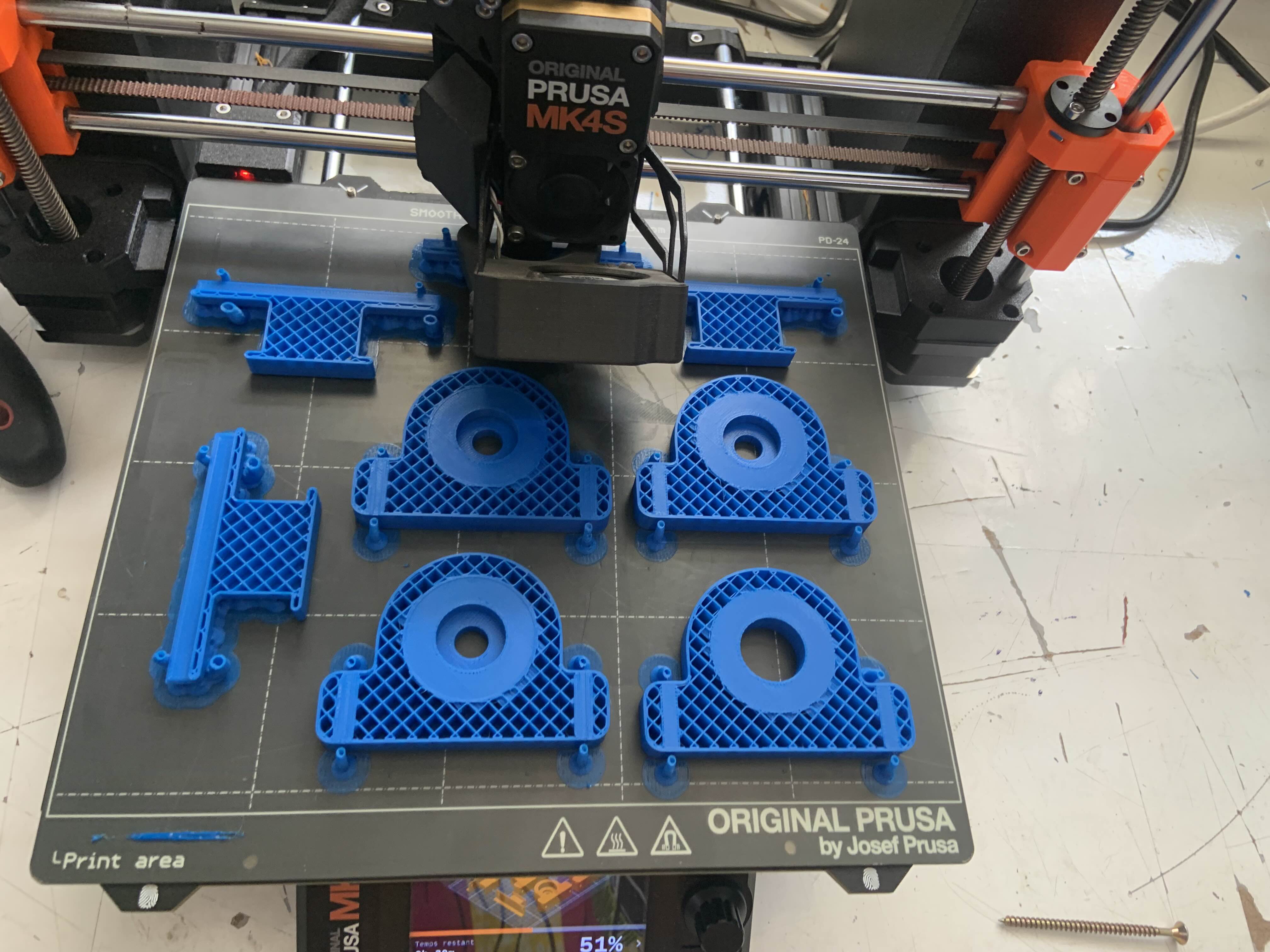
Approche retenue : Utilisation maximale du PLA pour l'impression 3D des composants structurels, combiné à des éléments spécifiques pour les parties mobiles.
Structure
100% PLA
Mécanique
PLA + Roulements
Transmission
Bande PVC
PLA - Acide Polylactique

Utilisation : Toutes les pièces imprimées (châssis, supports, guides)
Paramètres : 100% remplissage pour les pièces structurelles
Avantages
- Excellent rapport rigidité/poids
- Faible warping (déformation)
- Compatibilité avec tous les types d'imprimantes
Optimisations
- Orientation des pièces pendant l'impression
- Choix des paramètres de remplissage
- Post-traitement minimal
Bande
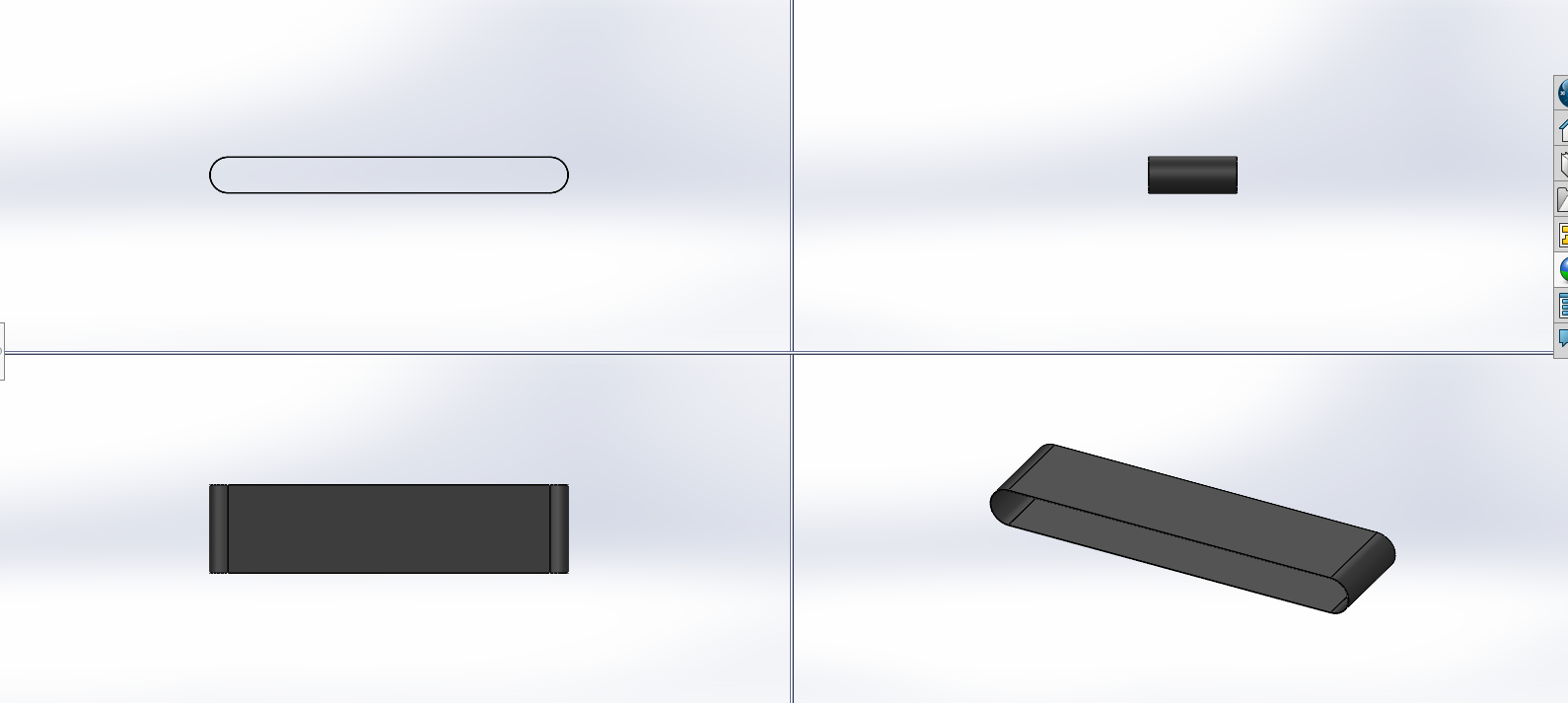
Utilisation : Bande transporteuse principale
Spécifications : Largeur 120mm, épaisseur 2mm
Propriétés
- Adhérence adaptée aux cubes
- Flexibilité pour enroulement
- Résistance à l'abrasion
Intégration
- Fixation par collage
- Tension réglable
- Compatibilité avec les tambours PLA
Roulements Métalliques

Type : Roulements à billes étanches (6300-2RS)
Justification : Nécessité de faible friction pour les parties rotatives
Caractéristiques
- Diamètre intérieur: 12mm
- Charge dynamique: 5.6kN
- Vitesse max: 14,000 tr/min
Intégration
- Press-fit dans les pièces PLA
- Jeu axial contrôlé
- Lubrification permanente
Avantages
- Coût total réduit de 60% vs solutions métalliques
- Temps de production divisé par 3
- Maintenance simplifiée
Inventaire des Pièces
Structure
- Châssis principal
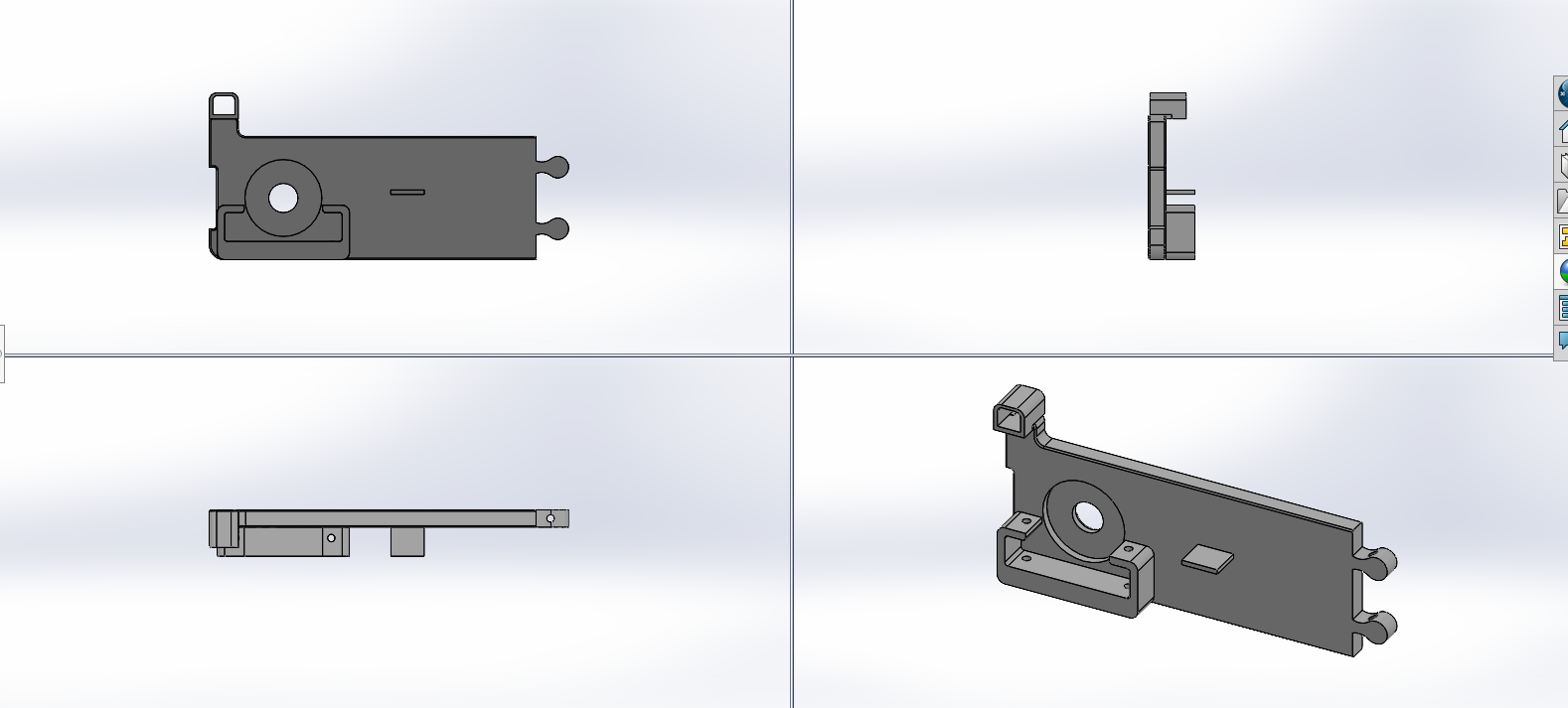
- Support latéral gauche
- Support latéral droit
- Guide d'entrée gauche
- Guide d'entrée droit
- Plancher capteur couleur
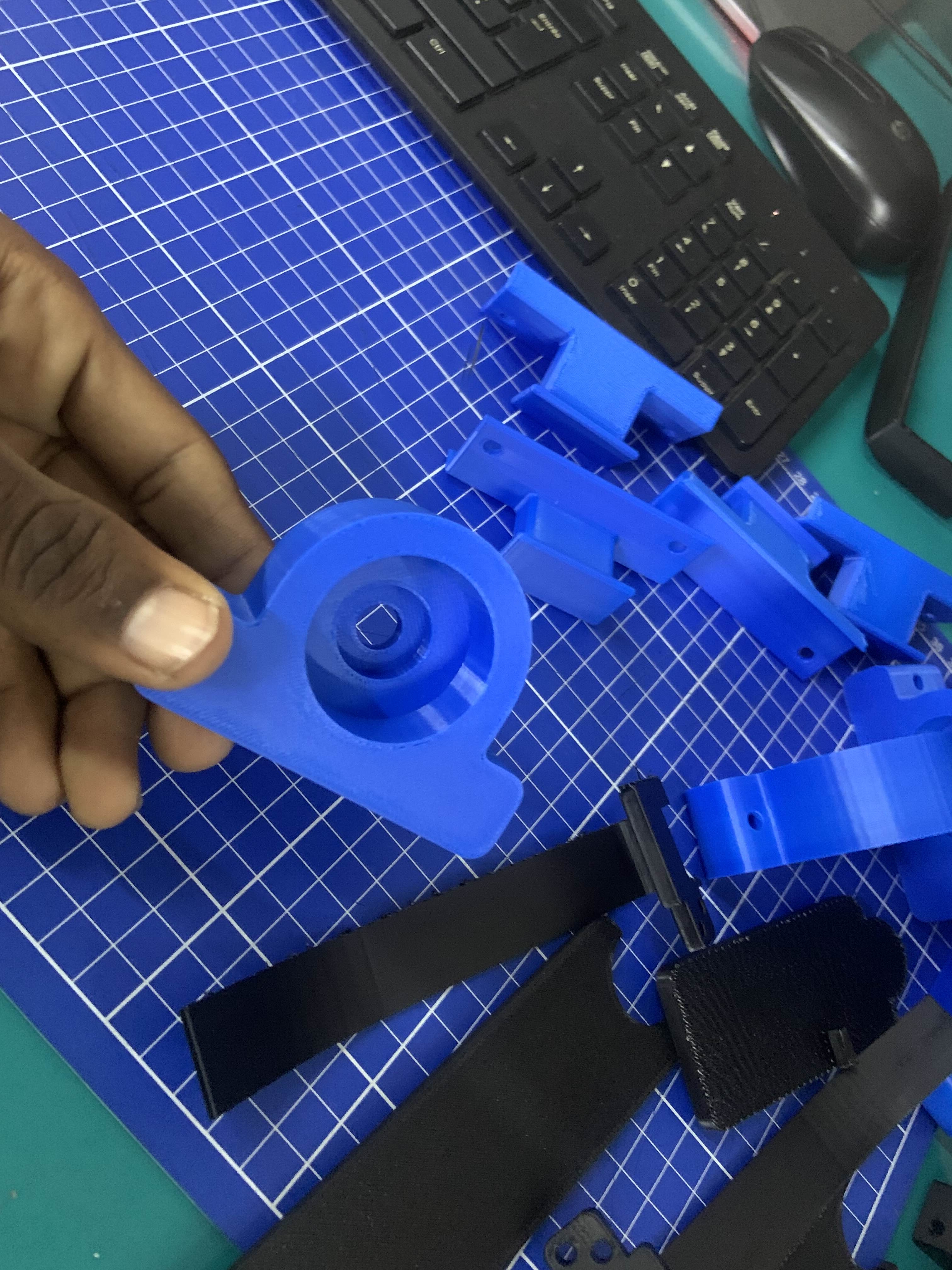
Mécanique
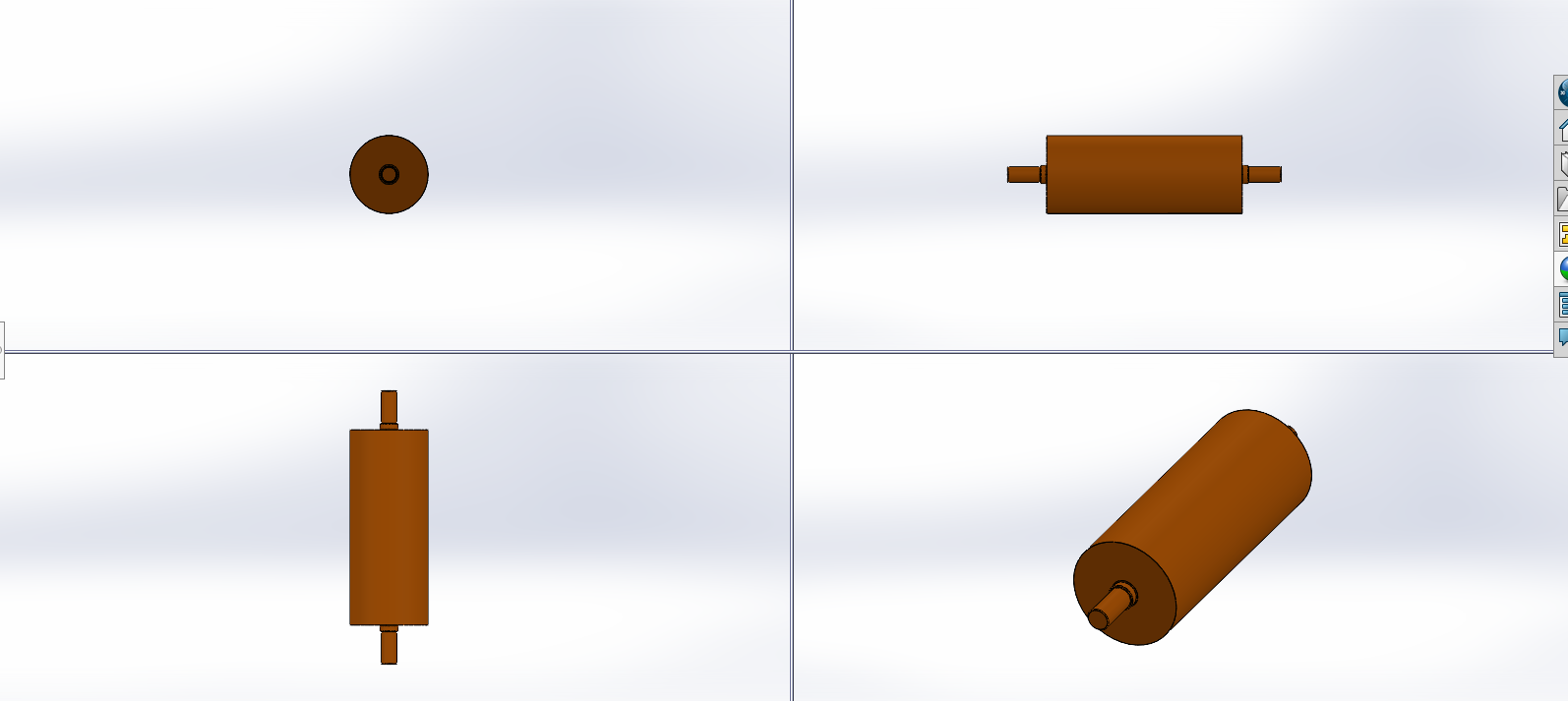
- Tambour moteur
- Tambour de retour
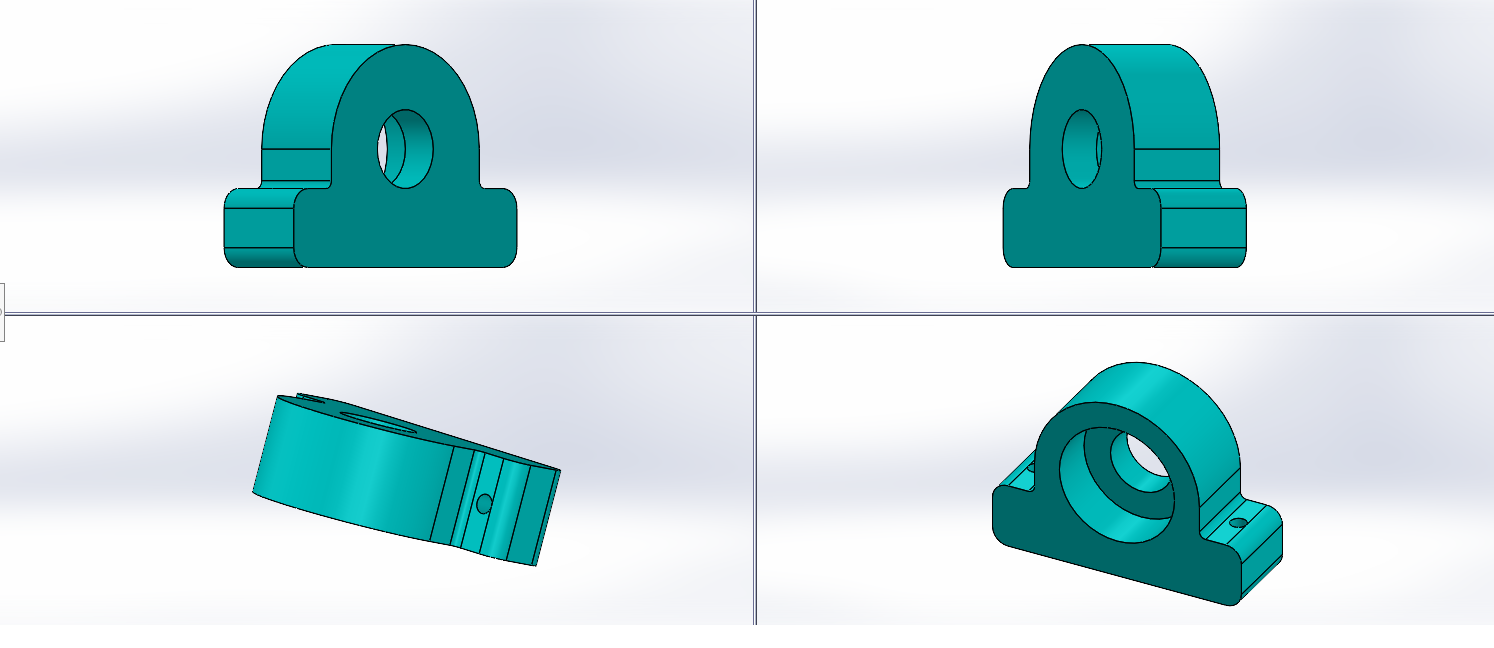
- Palier simple (x2)
- Palier moteur
- Roulements 6300-2RS (x4)
- Bande PVC 120mm
Système
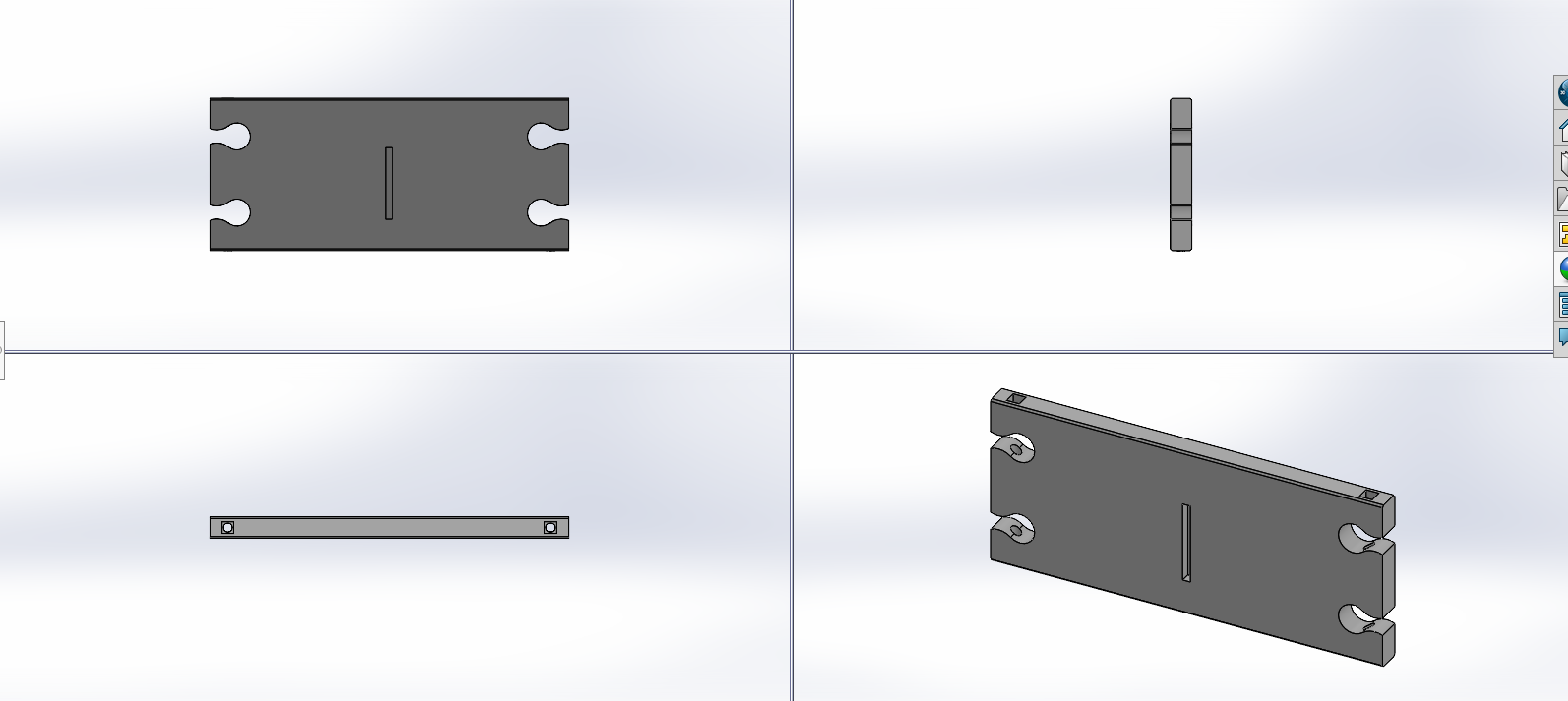
- Planche aiguillage (x2)
- Support aiguillage
- Axe rotatif
- Support servomoteurs
- Tige servo
- Capteur couleur
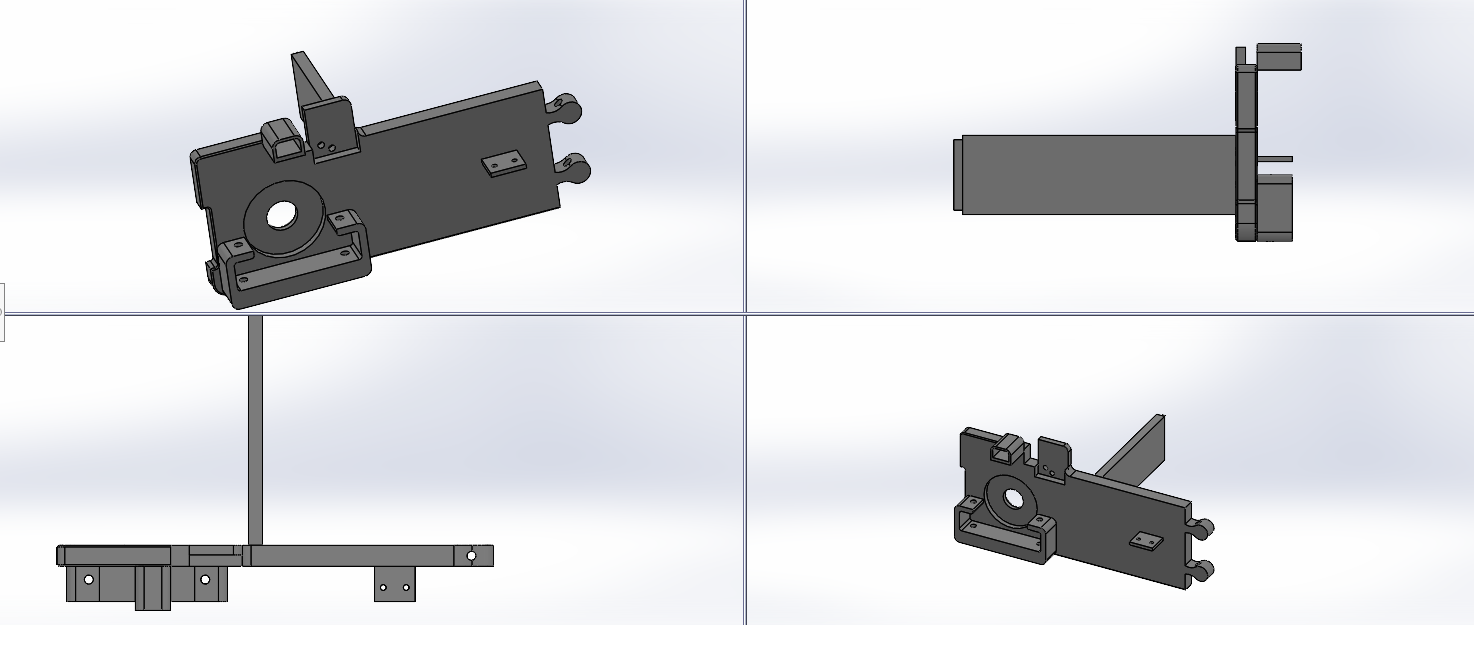
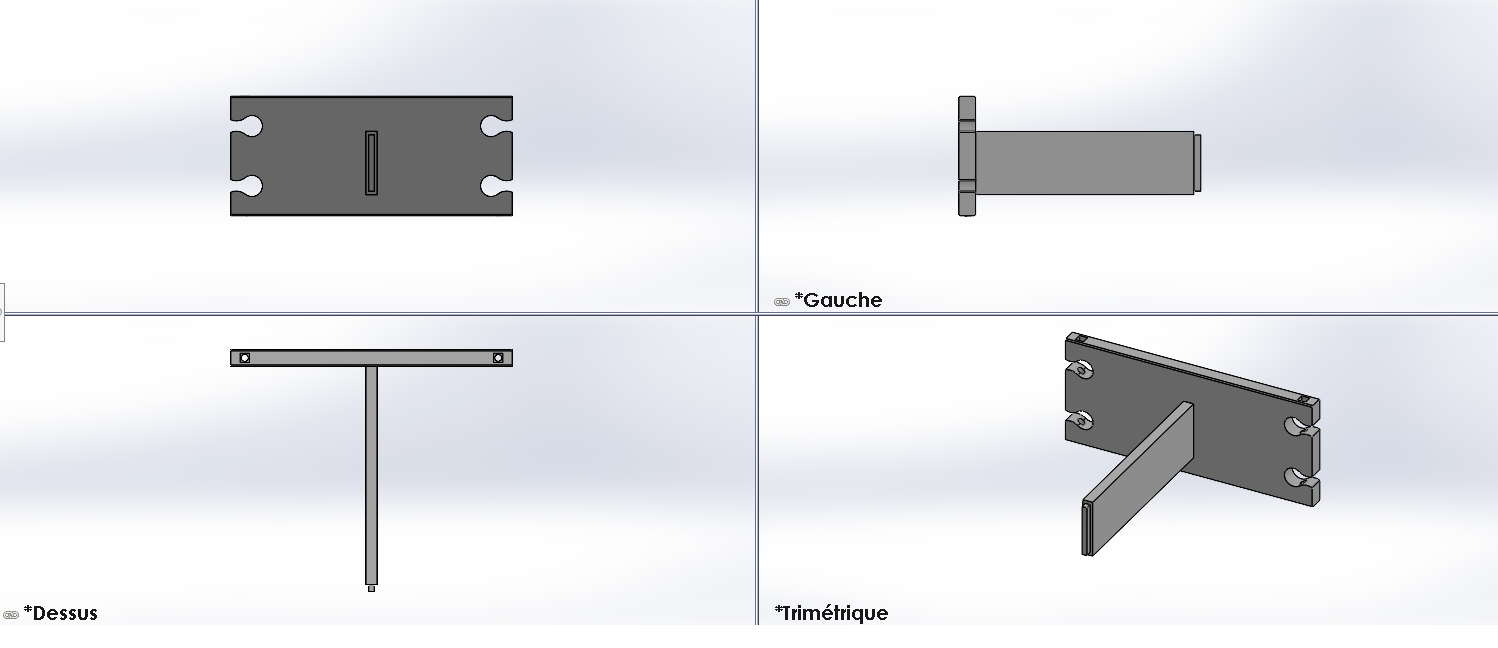
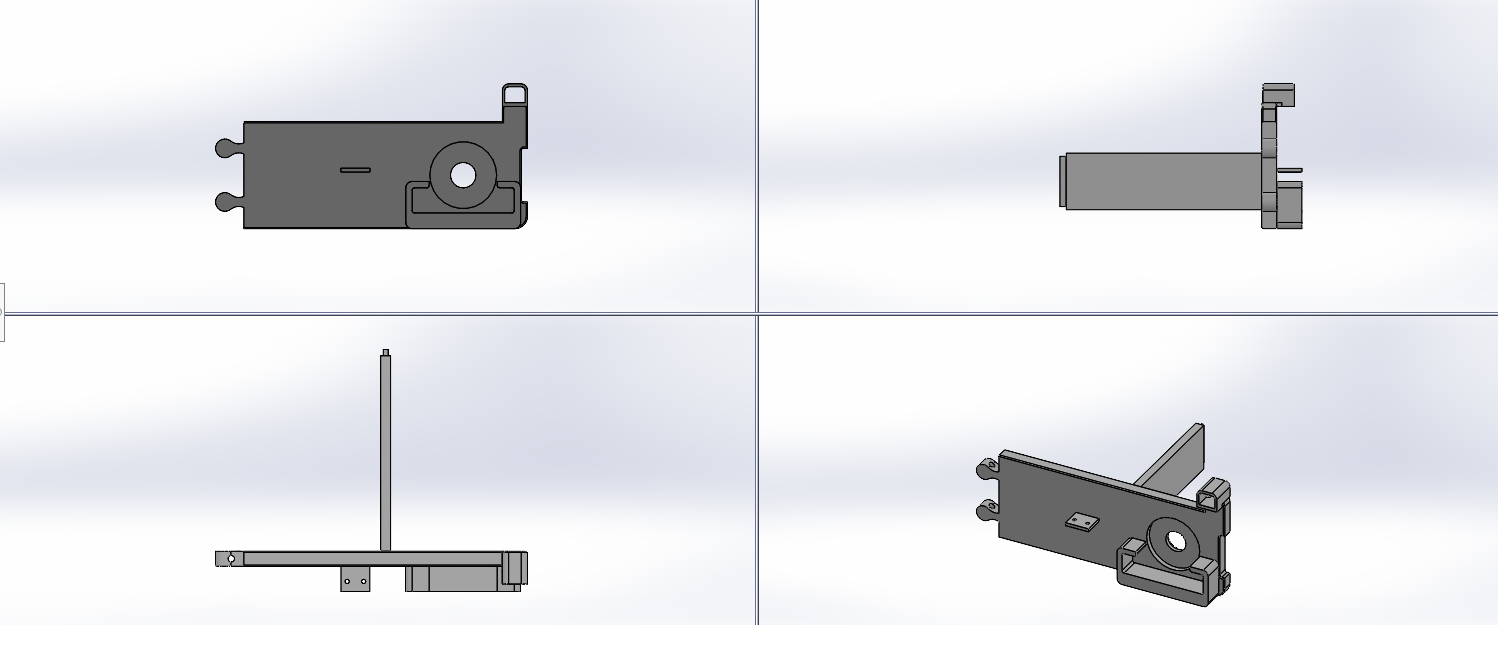
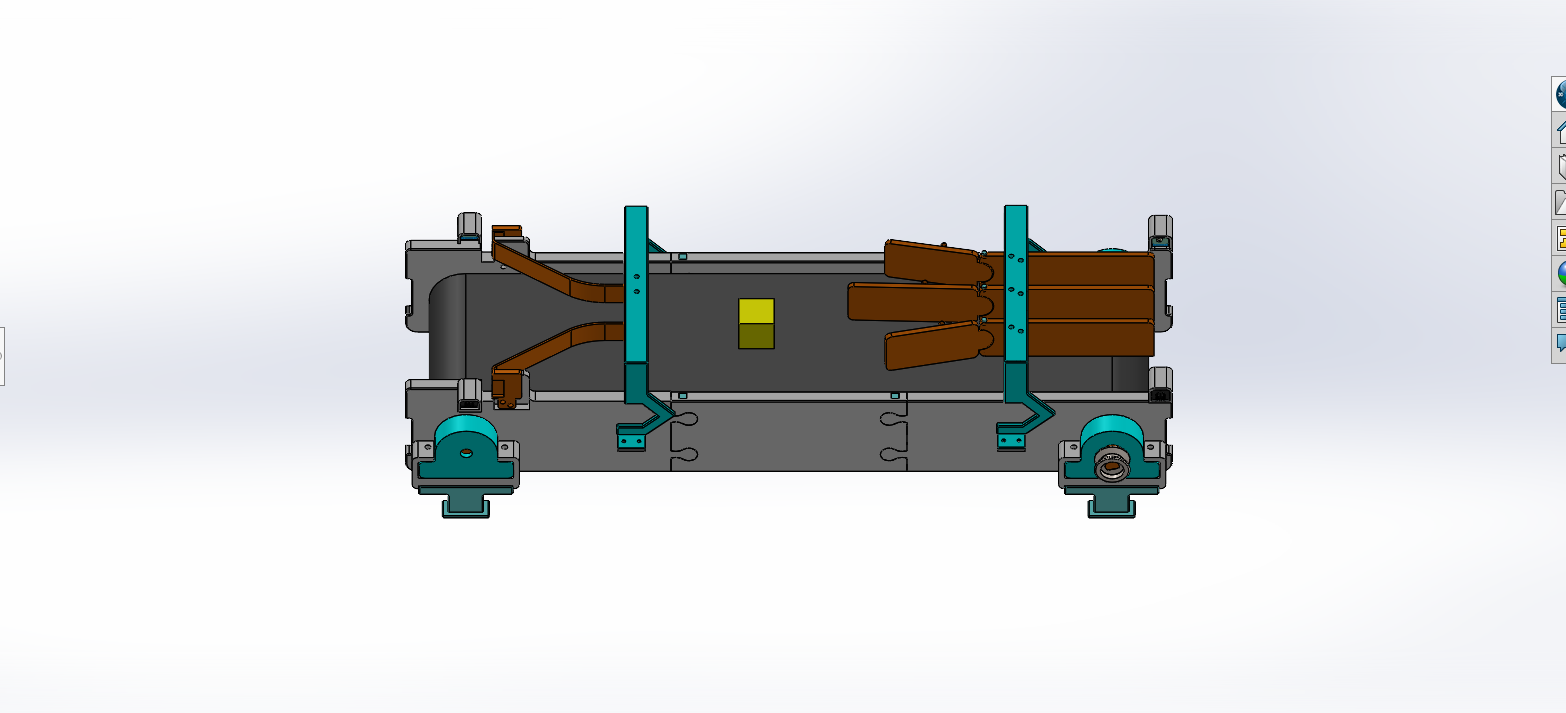
Modélisation CAO Complète
Catalogue des Pièces
Support Gauche - Section A
Partie supérieure - PLA
Dimensions : 225×100×12mm
Support Gauche - Section B
Partie centrale - PLA
Dimensions : 200×85×12mm
Support Gauche - Section C
Partie inférieure - PLA
Dimensions : 225×100×12mm
Support Droit - Section A
Partie supérieure - PLA
Dimensions : 225×100×12mm
Support Droit - Section B
Partie centrale - PLA
Dimensions : 200×85×12mm
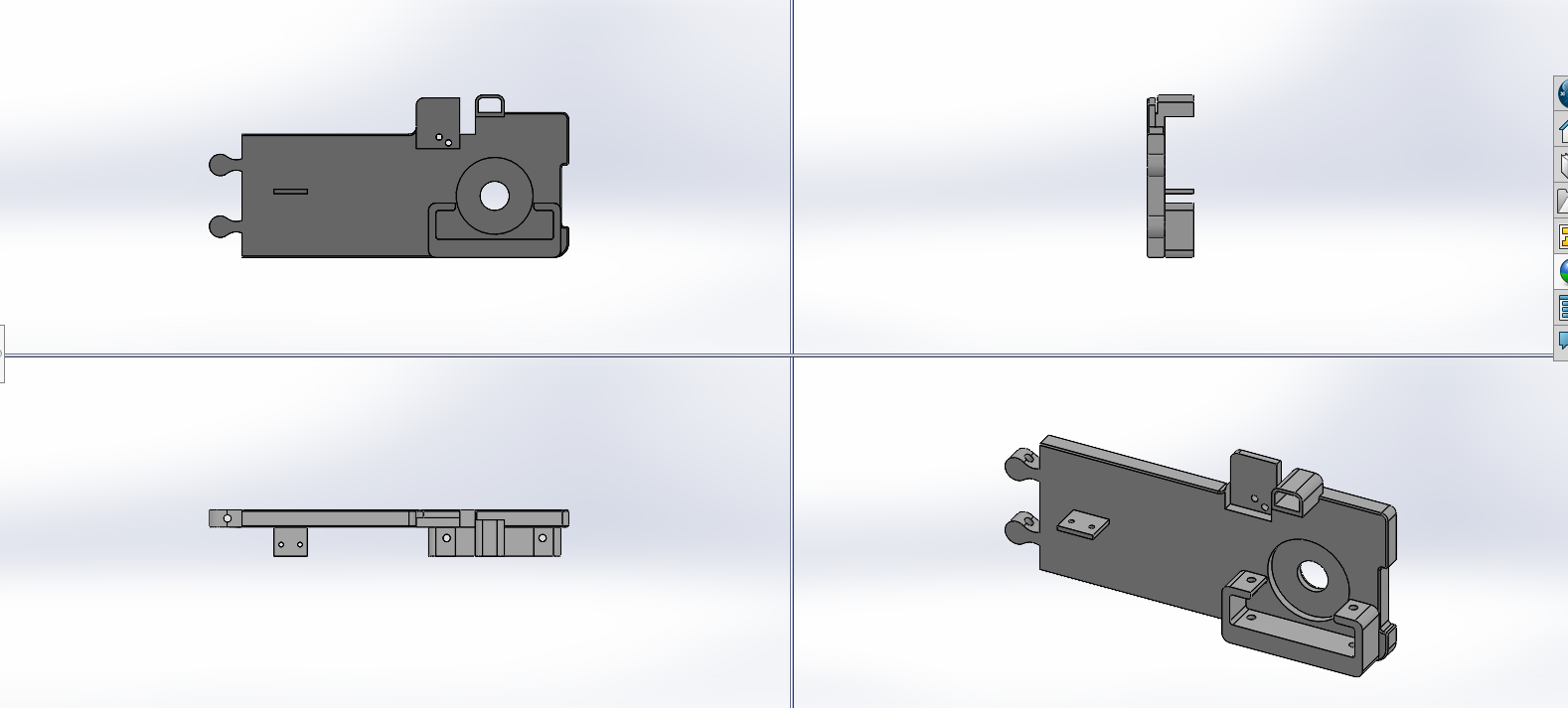
Support Droit - Section C
Partie inférieure - PLA
Dimensions : 225×100×12mm
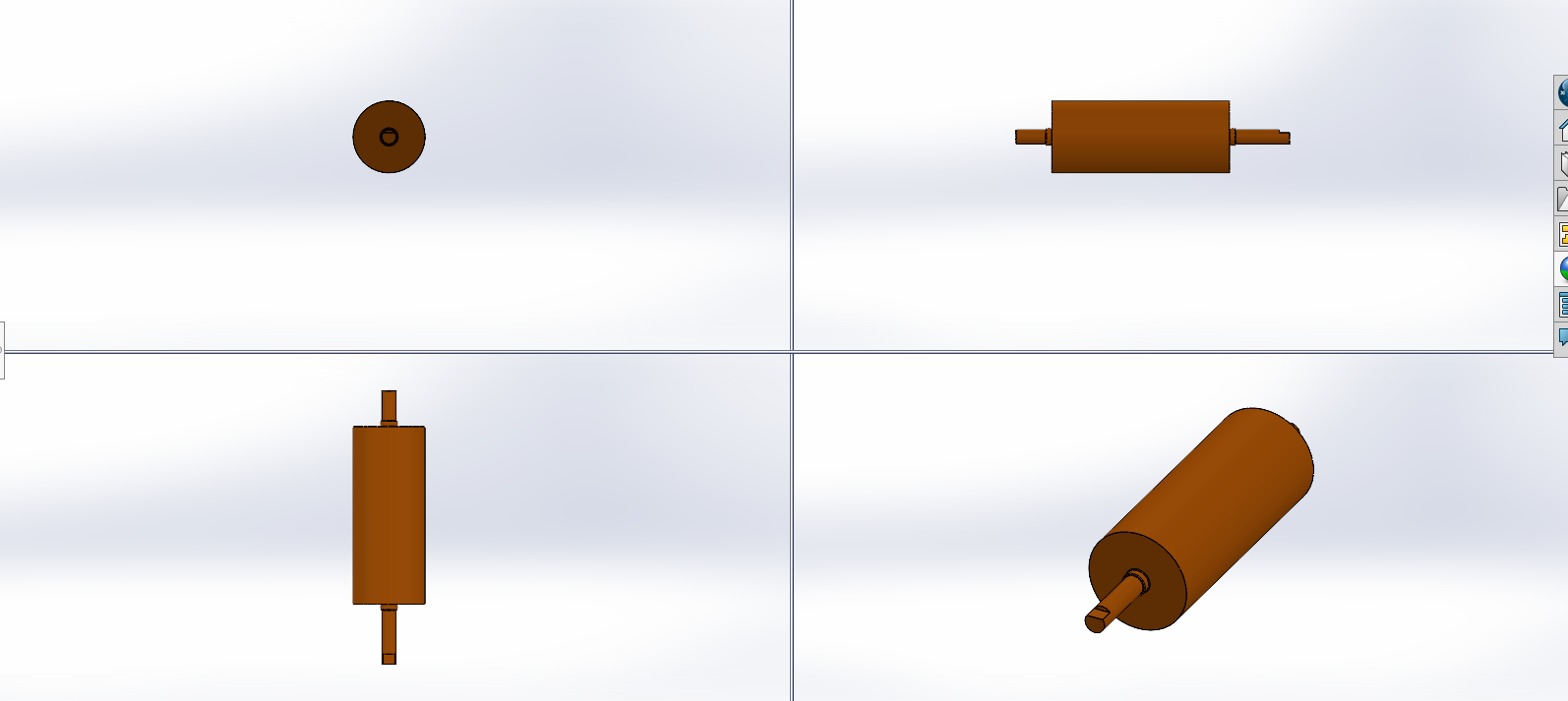
Tambour Moteur
Ø60mm - PLA
Tambour Retour
Ø60mm - PLA
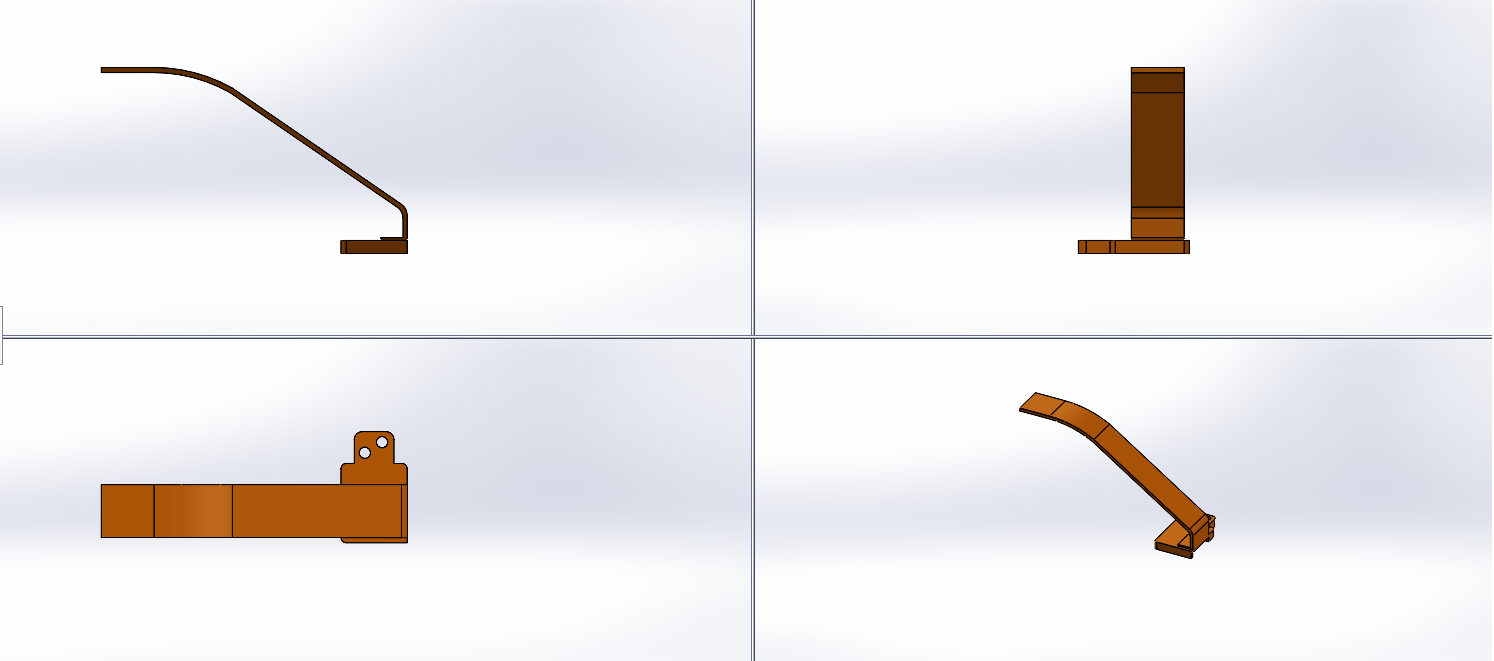
Guide Gauche
Angle 45° - PLA
Guide Droit
Angle 45° - PLA
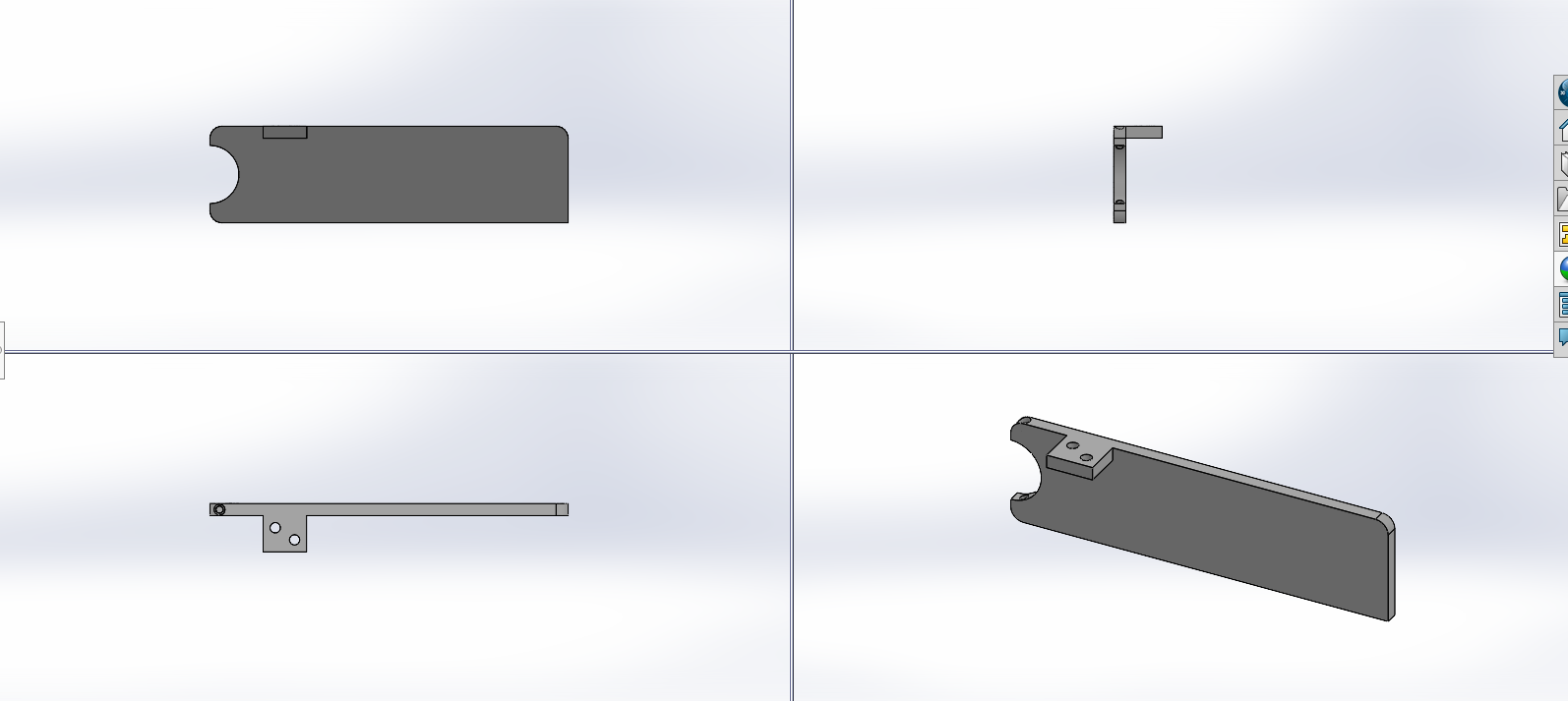
Planches Aiguillage Fixe
3× - PLA
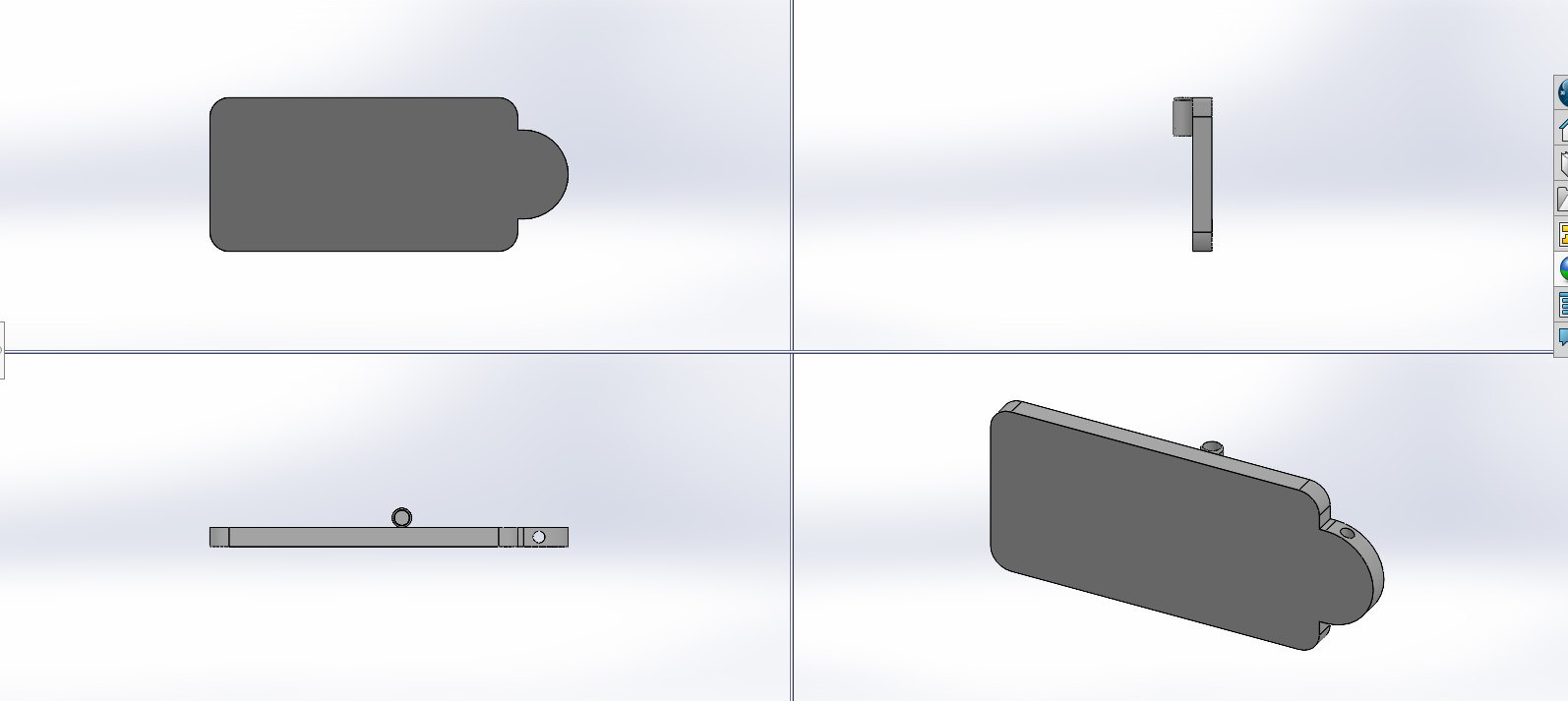
Planches Aiguillage mobile
3× - PLA

Support Aiguillage
Maintient des planches
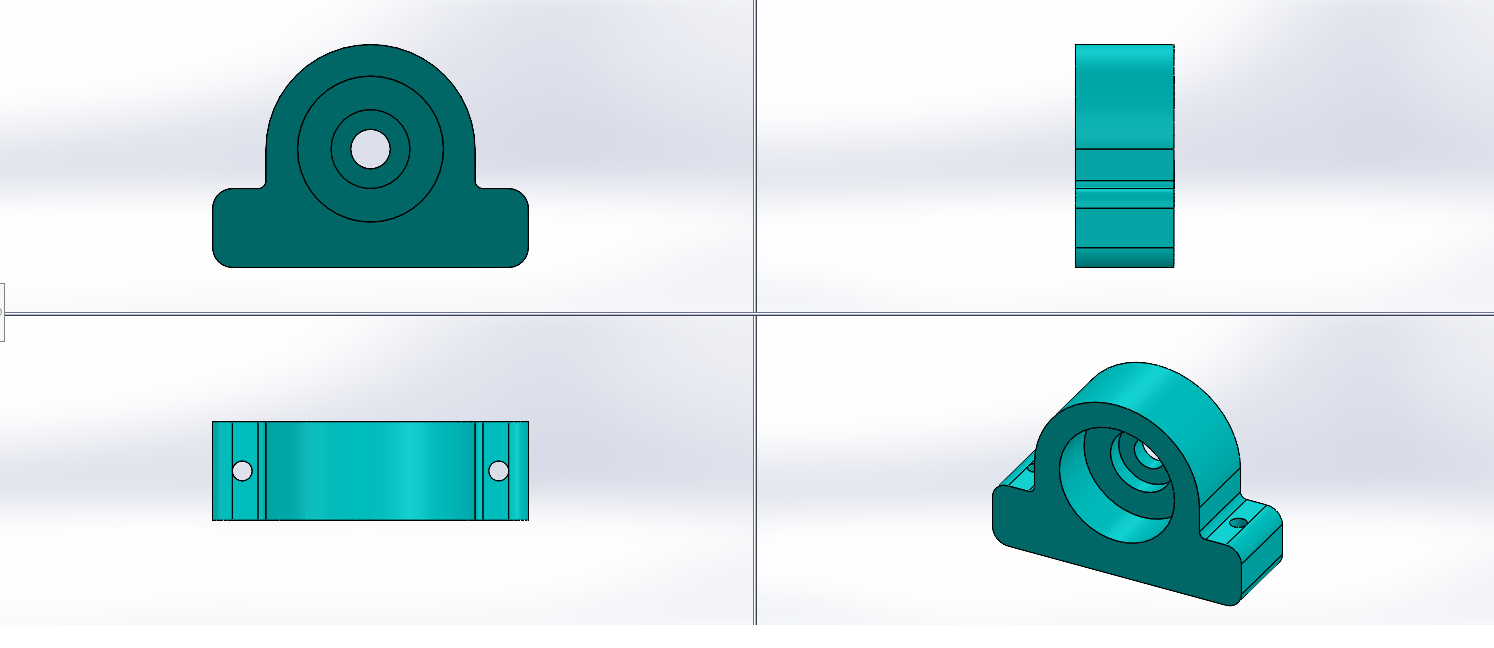
Palier Simple
Roulement 6300-2RS
Palier Moteur
Roulement 6300-2RS + Entraînement

Plancher Capteur
Support TCS3752
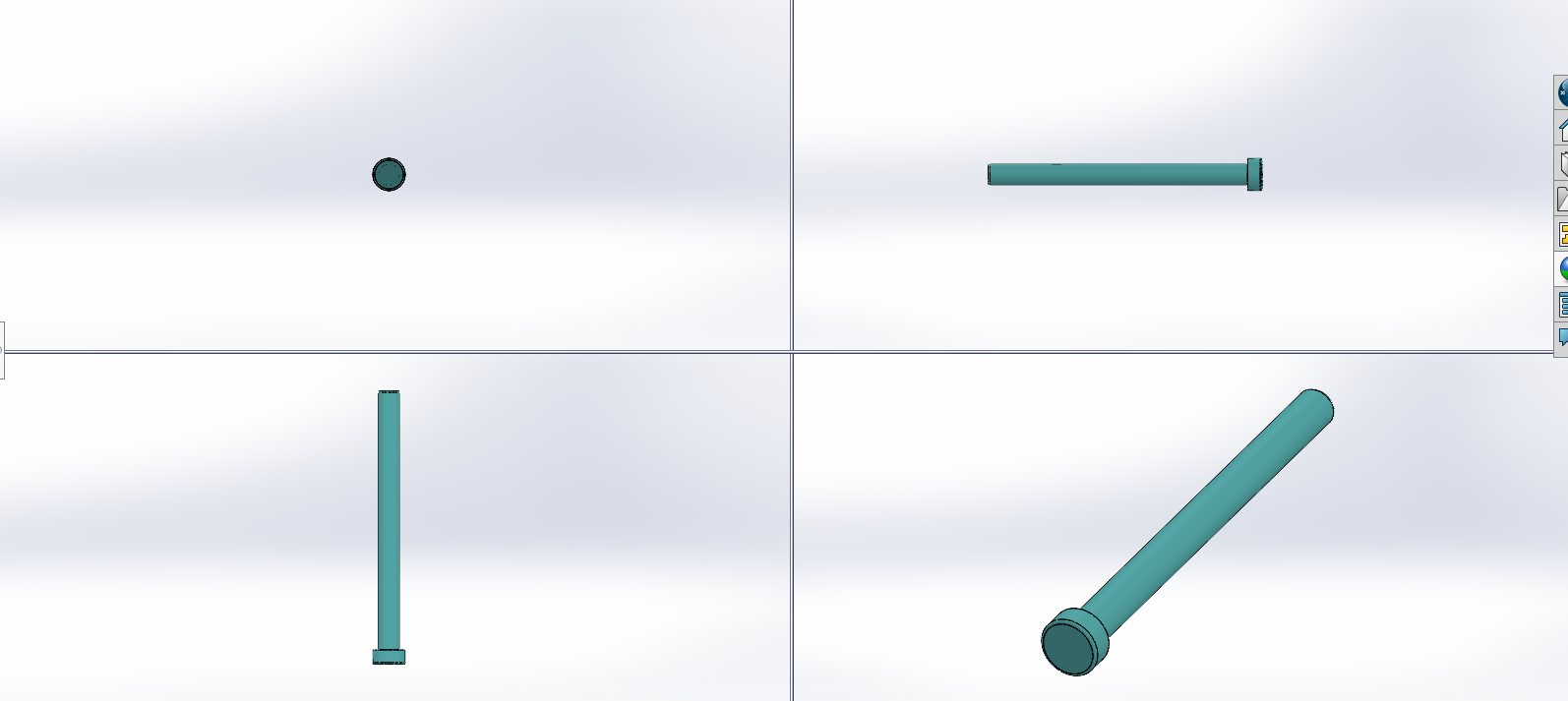
Axe Rotatif
Ø4×37.5mm
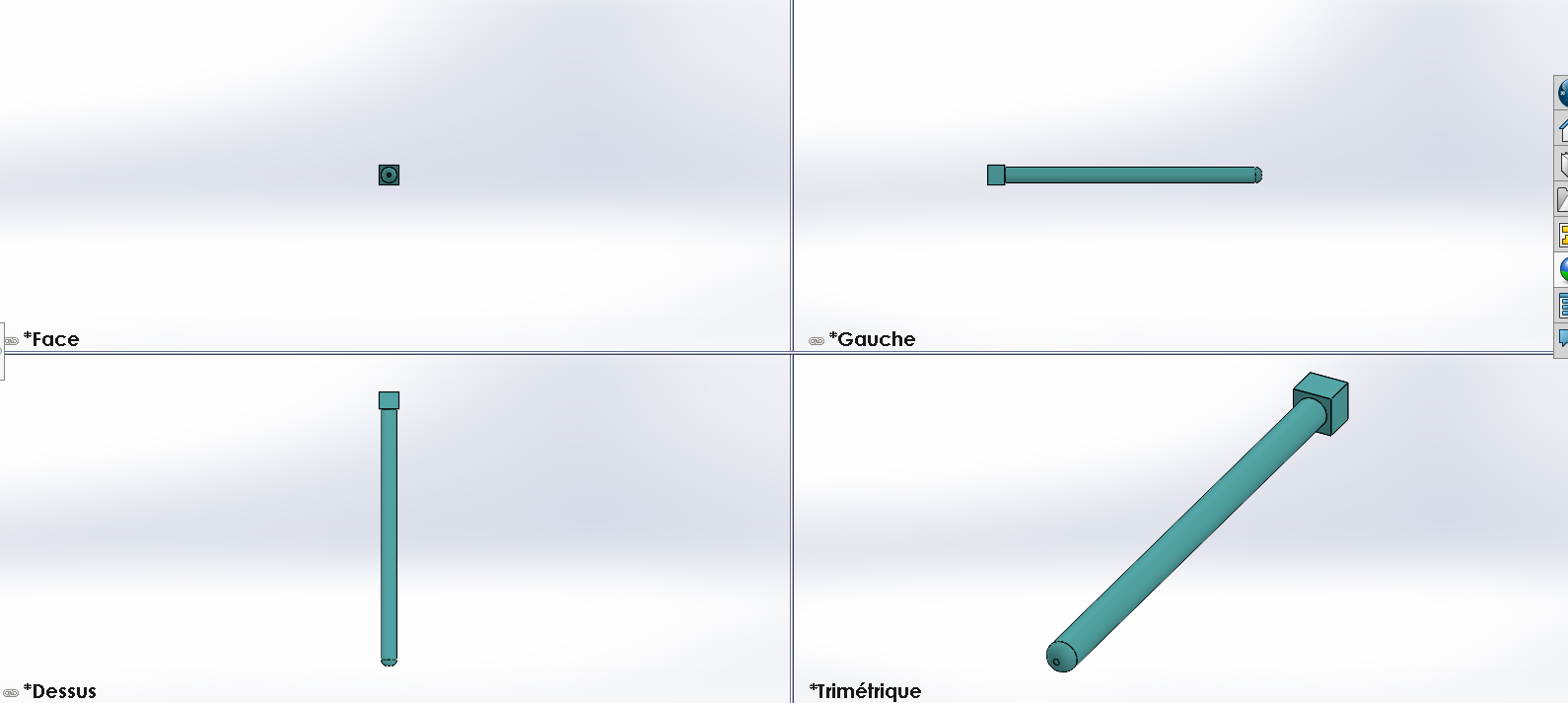
Axe fixation
Ø6×86.5mm
Séquence d'Assemblage
Étapes Clés
-
Montage structurel
- Assemblage supports latéraux
- Fixation plancher capteur
-
Installation mécanique
- Montage tambours + roulements
- Pose bande transporteuse
-
Intégration système
- Aiguillage + servomoteurs
- Capteurs couleur
Visualisation 3D

Animation du processus d'assemblage
Outillage requis : Clé Allen 3mm, tournevis cruciforme, jauge d'alignement
Validation Complète
Résistance
Facteur de sécurité > 2.5 sur toutes les pièces en PLA
Cinématique
Aucune interférence dans la plage de mouvement
Tolérances
Jeux fonctionnels < 0.5mm sur les parties mobiles
Tous les composants répondent aux spécifications mécaniques avec une marge de sécurité de 20%
Dimensionnement
Le dimensionnement du convoyeur à bande est réalisé en fonction des spécifications du cahier des charges :
- Longueur totale : 650 mm (imposée)
- Hauteur du tapis : 100 mm par rapport au sol
- Largeur de la bande : 150 mm (adaptée aux cubes de 30 mm)
- Zone de détection : positionnée à mi-parcours pour optimiser le tri
- Réceptacles de tri : dimensionnés pour accueillir plusieurs cubes de 30 mm
Schéma coté
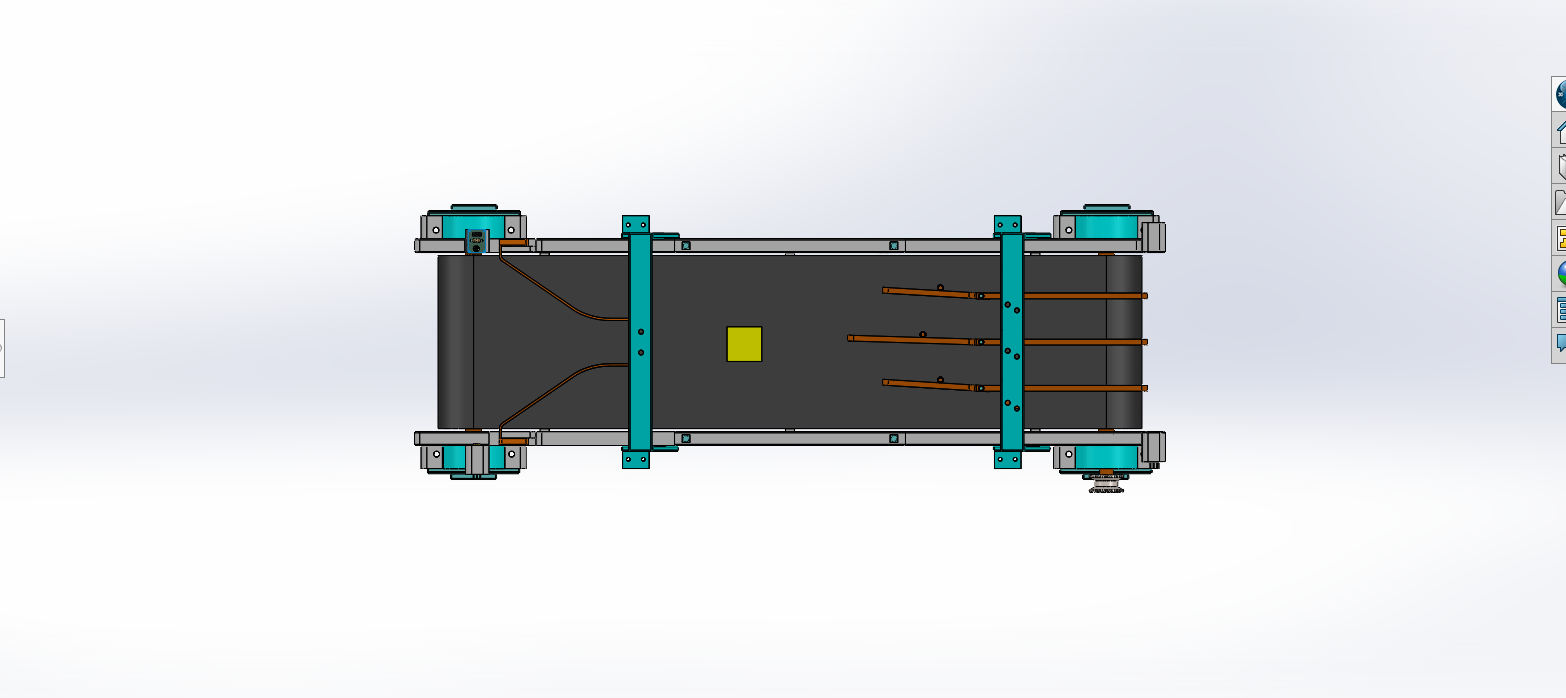
Plan d'ensemble
Télécharger les Fichiers du Projet
Pack Complet SolidWorks
Tous les fichiers sources (.SLDASM, .SLDPRT)
- Assemblage principal et sous-ensembles
- 42 pièces détachées
- Des images inclues
Pack Impression 3D
Fichiers STL prêts à imprimer
- Toutes les pièces au format .STL
Informations Importantes
Recommandations
- SolidWorks 2025 pour les fichiers sources
- Vérifier les chemins des dépendances après extraction
- Imprimer avec un remplissage de 20-40% selon la pièce
Pour l'impression, ajustez les paramètres selon votre machine.
Prototype Final Voir plus
Démonstration du convoyeur en action
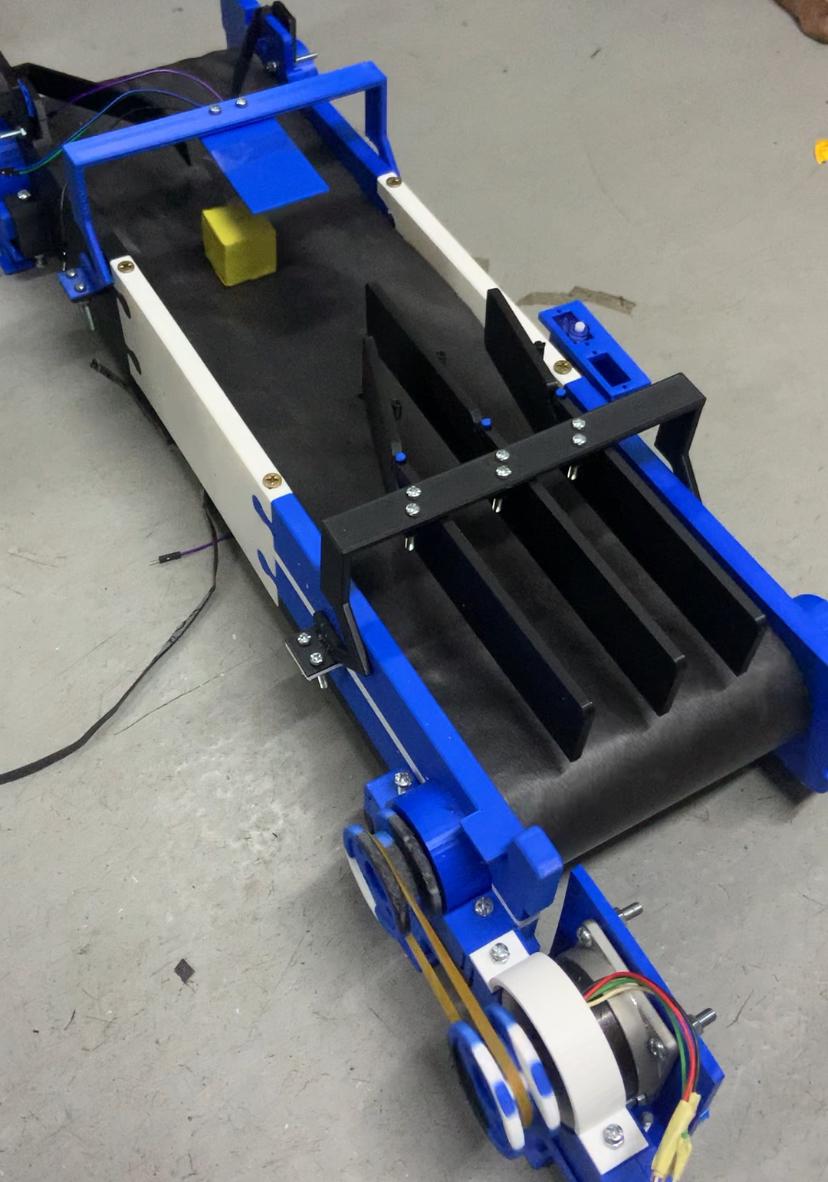
Vue d'ensemble
Détail mécanique
Test en cours

Retour d'Expérience
Ce qui fonctionne bien
- Fluidité du convoyeur
- Robustesse générale
Points à améliorer
- Stabilité à haute vitesse
- Bruit des mécanismes
- L'entrainement normale de la courroie
Conclusion
Le convoyeur à bande conçu dans ce projet répond à l'ensemble des exigences du cahier des charges et des jurys : robustesse, sécurité, modularité, documentation et évolutivité. La démarche collaborative, la traçabilité sur GitHub et l'intégration des contraintes mécaniques, électroniques et informatiques garantissent la réussite du projet et sa réutilisation lors du challenge final.