Test1: Creating a Robot Class
We designed a small simulation program for waste collection.
We created a Robot class, which is inherited by two other classes: CollectorRobot and SorterRobot .
As their names suggest:
CollectorRobot is a robot that navigates a map to collect waste and deposit it at a predefined destination.
SorterRobot is a robot positioned at the CollectorRobot's destination. It receives the collected waste and performs sorting.
During program execution, the collection and sorting process will be visualized using Ncurses.
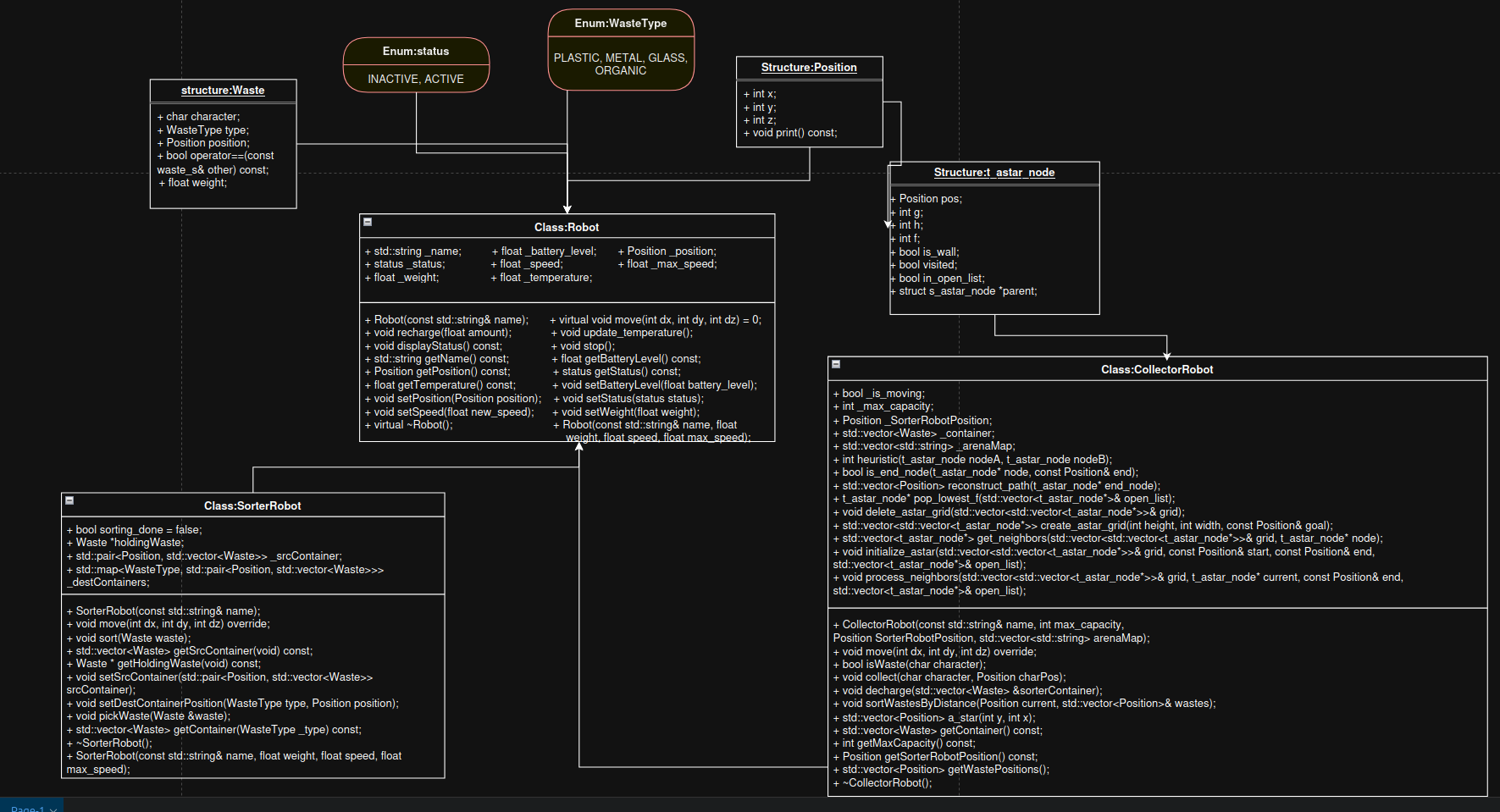
Robot Abstract Class
The Robot.hpp header defines the abstract base class for SorterRobot as well as supporting types for waste management and robot state.
Enumerations
WasteType
enum WasteType {
PLASTIC,
METAL,
GLASS,
ORGANIC
};Enumerates the types of waste the robot can handle: PLASTIC, METAL, GLASS, ORGANIC
status
enum status {
INACTIVE,
ACTIVE
};Represents the robot's operational state: INACTIVE, ACTIVE
Structures
Position
typedef struct pos {
int x;
int y;
int z;
void print() const {
std::cout << "(" << x << ", " << y << ", " << z << ")";
}
} Position;Represents a 3D position with integer coordinates (x, y, z).
Includes a print() method to display the position.
Waste
typedef struct waste_s {
char character;
WasteType type;
Position position;
float weight;
bool operator==(const waste_s& other) const {
return character == other.character &&
type == other.type &&
position.x == other.position.x &&
position.y == other.position.y &&
position.z == other.position.z;
}
} Waste;Represents a waste item with:
character: a char symbolizing the wastetype: the type of waste (WasteType)position: the waste's position (Position)weight: the waste's weightoperator==: allows comparison between twoWasteobjects (useful for searching in containers)
Class Robot
An abstract base class (cannot be instantiated directly) representing a generic robot.
class Robot {
public:
// Constructor
Robot(const std::string& name);
// Constructor with additional parameters
Robot(const std::string& name, float weight, float speed, float max_speed);
// [============== Pure Virtual Method ============]
virtual void move(int dx, int dy, int dz) = 0;
// [============== Common Methods ============]
void recharge(float amount);
void update_temperature(); // Simulation of overgheadting
void displayStatus() const;
void stop();
// [============== Getters ============]
std::string getName() const;
float getBatteryLevel() const;
Position getPosition() const;
status getStatus() const;
float getTemperature() const;
// [============== Setters ============]
void setBatteryLevel(float battery_level);
void setPosition(Position position);
void setStatus(status status);
void setSpeed(float new_speed);
void setWeight(float weight);
// Destructor
virtual ~Robot();
protected:
std::string _name;
float _battery_level;
Position _position;
status _status;
float _speed;
float _max_speed;
float _weight;
float _temperature;
};Main Features
Protected Attributes
//Robot's name
std::string _name;
//Current battery level
float _battery_level;
//Current position
Position _position;
//Current status
status _status;
//Current speed
float _speed;
//Maximum speed
float _max_speed;
//Robot's weight
float _weight;
//Current temperature
float _temperature;Constructors
Robot::Robot(const std::string& name)
: _name(name), _battery_level(100.0), _position({0,0,0}), _status(INACTIVE),
_speed(1.0), _max_speed(5.0), _weight(10.0), _temperature(0.0)
{}- Initializes the robot with a given name and default values for attributes.
Robot::Robot(const std::string& name, float weight, float speed, float max_speed)
: _name(name), _battery_level(100.0), _position({0,0,0}), _status(INACTIVE),
_speed(speed), _max_speed(max_speed), _weight(weight), _temperature(0.0)
{}- Initializes the robot with given name, weight, speed and default values for other attributes.
Pure Virtual Method
virtual void move(int dx, int dy, int dz) = 0;- Forces derived classes to implement movement logic.
Common Methods
void Robot::recharge(float amount) {
_battery_level += amount;
if (_battery_level > 100.0f)
_battery_level = 100.0f;
}- Recharge the robot's battery.
void Robot::update_temperature() {
_temperature += 1.0f;
if (_temperature > 100.0f)
_temperature = 100.0f;
}- Simulate temperature changes.
void Robot::displayStatus() const {
std::cout << "Robot: " << _name << std::endl;
std::cout << "Status: " << (_status == ACTIVE ? "ACTIVE" : "INACTIVE") << std::endl;
std::cout << "Battery: " << _battery_level << "%" << std::endl;
std::cout << "Temperature: " << _temperature << "°C" << std::endl;
std::cout << "Position: ";
_position.print();
std::cout << std::endl;
}- Display the robot's current status.
void Robot::stop() {
_status = INACTIVE;
_speed = 0.0f;
}- Stop the robot.
Getters
std::string Robot::getName() const {
return _name;
}
float Robot::getBatteryLevel() const {
return _battery_level;
}
Position Robot::getPosition() const {
return _position;
}
status Robot::getStatus() const {
return _status;
}
float Robot::getTemperature() const {
return _temperature;
}- Access the robot's name, battery level, position, status, and temperature.
Setters
void Robot::setBatteryLevel(float battery_level) {
_battery_level = battery_level;
}
void Robot::setPosition(Position position) {
_position = position;
}
void Robot::setStatus(status status_) {
_status = status_;
}
void Robot::setSpeed(float new_speed) {
if (new_speed > _max_speed)
_speed = _max_speed;
else if (new_speed < 0.0f)
_speed = 0.0f;
else
_speed = new_speed;
}
void Robot::setWeight(float weight) {
_weight = weight;
}- Modify the robot's battery level, position, status, speed, and weight.
Destructor
Robot::~Robot() {}- Ensures proper cleanup in derived classes.