AI Documentation
Object Detection and Color Identification using Artificial Intelligence
This computer vision module is designed to integrate with our smart sorting solution. Its goal is to replace the color sensor by using artificial intelligence to analyze objects on a conveyor belt.
The process is simple:
A camera captures an image of an object on the conveyor belt.
The image is analyzed by the pre-trained YOLOv8x model to identify the presence of objects.
If an object is detected, the dominant color of the object is extracted.
The returned result includes:
- RGB color code
- Approximate color name
- Object detection confidence percentage
- Bounding box coordinates
Advantages over traditional color sensors
This method offers several significant advantages over traditional spot sensors:
- Increased accuracy: Analyzes the entire object instead of a single point
- Flexibility: Adapts to different shapes and sizes of objects
- Contextual intelligence: Differentiates between the object and the conveyor background
Technical Details
I - Detection Model: YOLOv8x
YOLO (You Only Look Once) is a pre-trained model developed by Ultralytics that enables real-time object detection. Our module uses the YOLOv8x model, the largest and most accurate version of the YOLOv8 family.
- YOLOv8x can recognize up to 80 object classes
- It offers an excellent trade-off between speed and accuracy, making it particularly suited for industrial environments.
- YOLOv8x was chosen for its ability to maximize detection precision, even in low-contrast images or when detecting small objects.
II - Dominant Color Identification
A key feature of this module is its ability to automatically and robustly identify the dominant color of the detected object.
Process Steps:
Object detection in the image
The image captured by the camera is analyzed by YOLOv8x. Once an object is detected, its bounding box coordinates are extracted, precisely locating the object's position in the image and ignoring the rest (background, other objects, visual noise).
Image cropping around the object
Using the bounding box coordinates, a sub-image, called the region of interest, is extracted. This keeps only the detected object, improving the reliability of color detection.
Color analysis using KMeans
Pixels from the region of interest are analyzed using the KMeans clustering algorithm (via the
scikit-learnlibrary). This groups pixels by color similarity to identify the dominant color.Color interpretation
The extracted dominant color is an RGB value (e.g.
[0, 255, 0]). This value is then compared to a dictionary of standard colors (red, green, blue, etc.) to deduce an approximate and understandable color name (e.g."green").
Data Flow
Image → YOLO Detection → Color Analysis → Result
🛠 Technologies Used
OpenCV: image readingUltralytics: loading the YOLOv8x modelscikit-learn: dominant color extraction using KMeansNumPy: pixel data manipulation
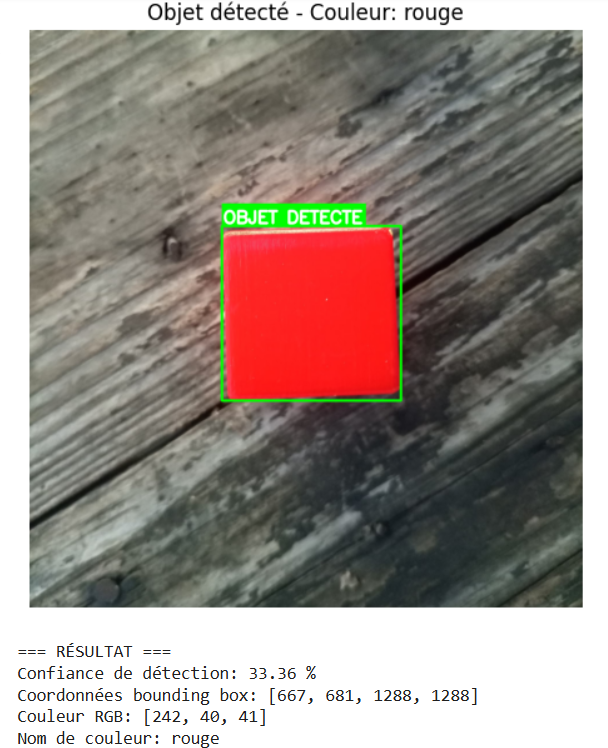
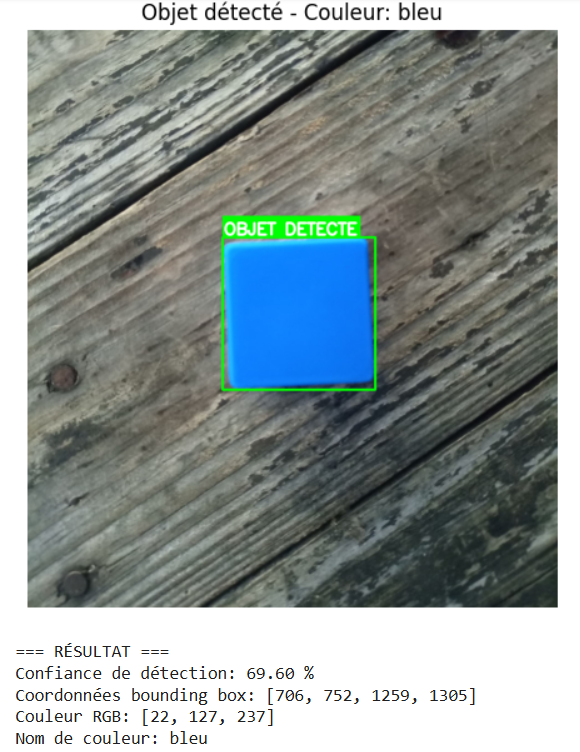
Output Results
The module returns the following information:
- RGB values: Digital color components
- Color name: (red, blue, green, etc.)
- Confidence level: Detection reliability (percentage)
- Detection coordinates: Object location in the image
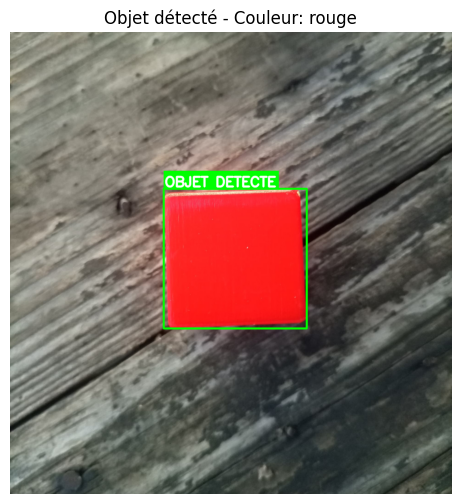
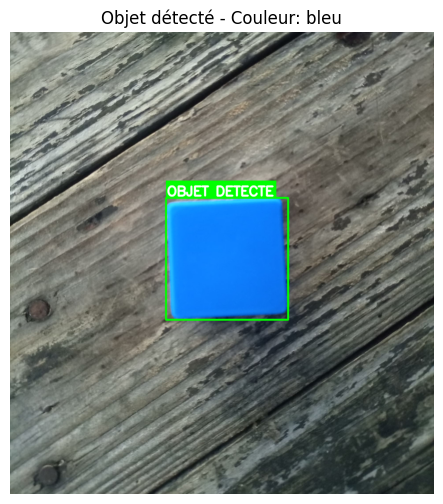
Images


Code Documentation
1. Imports and Dependencies
import cv2
import numpy as np
from ultralytics import YOLO
from PIL import Image
from sklearn.cluster import KMeans
import matplotlib.pyplot as pltRole: Working environment configuration
cv2: Image processing (OpenCV)numpy: Pixel-level numerical calculationsultralytics: YOLO object detection modelsklearn.cluster: KMeans algorithm for color analysismatplotlib: Result visualization
2. Function load_image()
def load_image(image_path):
"""Load an image from a file path"""
image = cv2.imread(image_path)
image_rgb = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
return image_rgbRole: Image loading and preparation
- Reads image from a given path
- Converts from BGR (default in OpenCV) to RGB (standard), as YOLO expects RGB
- Returns the processed image
3. Function detect_objects()
def detect_objects(image, model_path='yolov8x.pt'):
"""Detect objects with YOLO"""
model = YOLO(model_path)
results = model(image)
return results[0]Role: YOLOv8x object detection
- Loads the pre-trained YOLOv8x model
- Applies it to the input image
- Returns detection results (bounding boxes, classes, confidences)
4. Function filter_objects_by_area()
def filter_objects_by_area(results, min_area_ratio=0.001, max_area_ratio=0.3):
"""Filter objects by bounding box area"""
image_area = results.orig_shape[0] * results.orig_shape[1]
filtered_boxes = []
if results.boxes is not None:
for box in results.boxes:
x1, y1, x2, y2 = box.xyxy[0].cpu().numpy()
box_area = (x2 - x1) * (y2 - y1)
area_ratio = box_area / image_area
if min_area_ratio <= area_ratio <= max_area_ratio:
filtered_boxes.append({
'box': [int(x1), int(y1), int(x2), int(y2)],
'area': box_area,
'confidence': float(box.conf[0]),
'class': int(box.cls[0])
})
filtered_boxes.sort(key=lambda x: x['area'])
return filtered_boxesRole: Intelligent object selection
- Calculates the area of each bounding box
- Filters out too-small or too-large detections
- Sorts objects by ascending area
- Returns the most relevant objects
5. Function extract_dominant_color()
def extract_dominant_color(image, bbox, n_colors=1):
"""Extract the dominant color from a region of the image"""
x1, y1, x2, y2 = bbox
roi = image[y1:y2, x1:x2]
roi_resized = cv2.resize(roi, (50, 50))
pixels = roi_resized.reshape(-1, 3)
kmeans = KMeans(n_clusters=n_colors, random_state=42, n_init=10)
kmeans.fit(pixels)
dominant_color = kmeans.cluster_centers_[0].astype(int)
return dominant_colorRole: Object color analysis
- Crops the detected object
- Optimizes by resizing to 50x50 pixels
- Applies KMeans to find the main color
- Returns RGB value of the dominant color
6. Function rgb_to_name()
def rgb_to_name(rgb):
"""Convert RGB color to approximate color name"""
r, g, b = rgb
colors = {
'red': [255, 0, 0],
'green': [0, 255, 0],
'blue': [0, 0, 255],
'yellow': [255, 255, 0],
'magenta': [255, 0, 255],
'white': [255, 255, 255],
'black': [0, 0, 0],
'gray': [128, 128, 128],
'orange': [255, 165, 0],
'purple': [128, 0, 128],
'pink': [255, 192, 203],
'brown': [165, 42, 42]
}
min_distance = float('inf')
closest_color = 'unknown'
for color_name, color_rgb in colors.items():
distance = np.sqrt(sum([(a - b) ** 2 for a, b in zip(rgb, color_rgb)]))
if distance < min_distance:
min_distance = distance
closest_color = color_name
return closest_colorRole: Approximate color naming
- Compares RGB value to reference colors
- Calculates Euclidean distance
- Returns closest match name
7. Function visualize_result()
def visualize_result(image, bbox, color, color_name):
"""Visualize the result with bounding box"""
plt.figure(figsize=(8, 6))
image_copy = image.copy()
x1, y1, x2, y2 = bbox
cv2.rectangle(image_copy, (x1, y1), (x2, y2), (0, 255, 0), 7)
text = "OBJECT DETECTED"
font = cv2.FONT_HERSHEY_SIMPLEX
font_scale = 2
thickness = 7
(text_width, text_height), baseline = cv2.getTextSize(text, font, font_scale, thickness)
cv2.rectangle(image_copy,
(x1, y1 - text_height - baseline - 10),
(x1 + text_width + 10, y1 - 5),
(0, 255, 0), -1)
cv2.putText(
image_copy,
text,
(x1 + 5, y1 - 10),
font,
font_scale,
(255, 255, 255),
thickness,
cv2.LINE_AA
)
plt.imshow(image_copy)
plt.title(f'Detected Object - Color: {color_name}')
plt.axis('off')
plt.show()Role: Display detection results visually
- Draws bounding box and label
- Displays annotated image
- Helps validate detection quality
copy)
plt.title(f'Detected Object - Color: {color_name}')
plt.axis('off')
plt.show()